





С начала 2011 года на территории Российской Федерации введен национальный стандарт ГОСТ Р МЭК/ТС 60034-17-2009 "Машины электрические вращающиеся. Часть 17. Руководство по применению асинхронных двигателей с короткозамкнутым ротором при питании от преобразователей", который в полном объеме соответствует Европейскому стандарту IEC/TS 60034-17:2006 "Rotating electrical machines. Part 17. Application guide for cage induction motors when fed from converters".
Этот стандарт обобщает ряд исследований, проведенных МЭК по применению стандартных общепромышленных электродвигателей в составе частотно-регулируемого привода. В публикации ГОСТ Р МЭК /ТС 60034-17-2009 рассматриваются как инверторы тока (тирристорные преобразователи частоты), так и инверторы напряжения (преобразователи частоты с IGBT-транзисторами). Положения стандарта не относятся к применению элекродвигателей, специально разработанных для питания через преобразователь частоты и соответствующих МЭК 60034-25:2007 "Машины электрические вращающиеся. Часть 25. Руководство по конструкции и эксплуатационным характеристикам двигателей переменного тока, специально предназначенных для элекропитания через преобразователь.
В настоящей статье рассмотрены основные положения стандарта ГОСТ Р МЭК/ТС 60034-17-2009 и собственный опыт автора в применении к частотному регулированию асинхронных электродвигателей преобразователями частоты с широтно-импульсной модуляцией выходного напряжения.
Наиболее часто в качестве преобразователей частоты используются инверторы напряжения с широтно-импульсной модуляцией (ШИМ-инвертора). При этом линейное напряжение ULL на выходе преобразователя частоты имеет форму импульсов постоянной амплитуды и переменной скважности (см. рис. 1).

Рисунок 1 - Форма линейного напряжения ULL при питании от инвертора напряжения с частотой коммутации fs = 30 f1.
Спектр выходного напряжения с синхронной или асинхронной последовательностью широтно-модулированных импульсов, в том числе и для инверторов с широтно-фазовой (векторной) модуляцией, содержит следующие частоты:
f = ks fs ± k1 f1,
где ks = 1, 2, 3, ... и k1 = 1, 2, 4, 5, 7, ... - кратности несущей fs и рабочей частоты f1 соответственно.
В преобразователях с ШИМ низкочастотные гармонические составляющие малы, а высокочастотные гармонические составляющие, определяемые частотой ШИМ-модуляции, гасятся индуктивностями электродвигателя.
Потери в стали и обмотках статора и ротора, вызываемые высшими гармониками напряжения и тока в асинхронном короткозамкнутом электродвигателе, питаемом от преобразователя частоты имееют существенную величину и ими нельзя принебречь.
В результате статистичесикх исследований установлено, что дополнительные потери, вызываемые гармониками тока и напряжения не зависят от нагрузки, но их величина снижается с увеличеним частоты коммутации из-за снижения потерь в обмотках при увеличении частоты ШИМ (см. рис. 2).
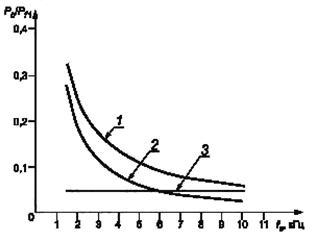
1 - общие потери, вызываемые гармониками; 2 - потери в обмотках; 3 - потери в стали
Рисунок 2 - Зависимость потерь Ph, вызываемых гармониками отностельно потерь P11 на рабочей частоте f1 от частоты коммутации fs в случае питания от инвертора напряжения
С учетом повышенных потерь и увеличенного нагрева, вызываемых гармониками питающего напряжения и тока, электродвигатель при номинальной скорости имеет меньший допустимый момент, чем при работе от сети. Кроме этого, из-за падения напряжения на элементах силовой цепи преобразователя частоты так же происходит снижение допустимого момента электродвигателя. Поскольку повышенный нагрев приводит к ускоренному старению изоляции обмоток электродвигателя, эксплуатация двигателя с номинальной нагрузкой снижает срок его службы.
С учетом различных параметров электродвигателя и спектральных составов напряжения инвертора и тока электродвигателя, а так же запаса двигателя по нагреву, заложенного в конструкцию мотора, представляется возможным определить кратность снижения момента электродвигателя. Однако решение данной задачи достаточно сложно для непосредственного пользователя электродвигателя, поэтому лучше при выборе электродвигателя ориентироваться на данные о снижении момента и мощности мощности при питании от преобразователя частоты, предоставленные производителем электродвигателя. Исседования, проведенные при подготовке ГОСТ Р МЭК/ТС 60034-17-2009 показывают, что в зависимости от параметров и конструкции электродвигателя кратность допустимого момента при питании от преобразователя частоты лежит в пределах от 0,8 до 1,0.
Сплошная линия на рисунке 3 показывает зависимость напряжения от частоты, при которой обеспечивается постоянство магнитного потока при синусоидальном питании. Такой закон регулирвоания позволяет поддерживать постоянный момент при условии, что активное сопротивление статора много меньше индуктивных сопротивлений в схеме замещения. Посокльку при снижении частоты, величины индуктивных сопротивлений падают, управление преобразователем необходимо осуществлять в соответствии с зависимостью, показанной на рисунке 3 пунктиром.

Рисунок 3 - Зависимость напряжения U1 от частоты f1
При увеличении частоты выше номинальной (f1/fN > 1,0) напряжение поддерживается на уровне номинального и асинхронный электродвигатель работает в режиме ослабления поля. Перегрузочная способность электродвигателя по моменту (кратность допустимого момента T1/TN) снижается при увеличении частоты в соответствии с зависимостью, приведенной на рисунке 4.

Рисунок 4 - Кратность допустимого момента короткозамкнутого асинхронного электродвигателя типа N (с самовентиляцией) в зависимости частоты при питании от инвертора.
Типичная зависимость кратности допустимого момента от частоты при питании от инвертора для электродвигателя типа N (с самовентиляцией) представлена на рисунке 4. Подобные кривые могут быть получены производителем электродвигателя расчетным или экспериментальным способом и будут отличаться при использовании инверторов различных типов.
В практических целях при оценке кратности допустимого момента при питании от преобрзователя частоты можно пользоваться следующими рассуждениями: исходя из параграфа 2 настоящей статьи, при наиболее распространенных частотах ШИМ около 3 кГц, дополнительные потери в двигателе составляют около 20%. При этом кратность допустимого момента электродвигателя на номинальной частоте вращения составляет около 0,8. Если электродвигатель имеет сервис-фактор S.F., больший единицы, то результирующую кратность допустимого момента при питании от преобразователя частоты можно оценить как 0,8 х S.F. Значение сервис-фактора является стандартной величиной и может быть получено у изготовителя электродвигателя. Обычное значение сервис-фактора общепромышленного элекродвигателя составляет 1,0.
Для оценки кратности допустимого момента электродвигателя без принудительной вентиляции на других частотах питающего напряжения можно воспользоваться графиком, представленным на рисунке 4, скорректированным с учетом полученной кратности допустимого момента на номинальной частоте вращения.
В электрориводах с инверторами напряжения, использующими ШИМ, наличие гармоник напряжения и тока вызывает как постоянные асинхронные вращающие моменты, так и пульсирующие составляющие момента, вызывающие вибрацию механических частей привода.
Частота основных пульсации определяется частотой коммутации ШИМ, а амплитуда пульсацией - шириной импульсов. Амплитуда пульсации, в соответствии с исследованиями, проведенными при подготовке ГОСТ Р МЭК/ТС 60034-17-2009 может составлять до 15% номинального момента, даже при условии, что частота коммутации превышает рабочую частоту более чем в 10 раз. При больших частотах коммутации (порядка 21f1) и модуляции по синусоидальному закону или векторной модуляции пульсации момента с частотами не имеют практического значения, как и пульсации с двойной частотой коммутации, если только эта частота не совпадает с резонансной частотой колебаний механической части.
Электромагнитный шум в асинхронных электродвигателях вызывается максвеловыми радиальными периодическими силами, возникающими в результате взаимодействия магнитных полей в воздушном зазоре. Заметным этот шум становится при совпадении частоты усилий с собственной частотой сердечника статора.
Проектирование электродвигателя обычно осуществляется исходя из синусоидального питания и при широком спектре гармоник поля при большом диапазоне регулирования скорости не удается избежать заметного шума на некоторых скоростях.
В соответствии с исследованиями, проведенными при подготовке ГОСТ Р МЭК/ТС 60034-17-2009, для двух и четырехполюсных машин резонансные частоты лежат в следующих диапазонах:
высота оси < 200 мм : f0,r = 0 > 4500 Гц - f0,r = 2 > 800 Гц - f0,r = 4 > 4000 Гц;
высота оси > 280 мм : f0,r = 0 < 3000 Гц - f0,r = 2 < 500 Гц - f0,r = 4 < 2500 Гц.
Как показывает практика, инверторы с постоянной несущей частотой вызывают больший электромагнитный шум, чем инверторы с управляемой или случайной частотой коммутации. Уровень звука при питании от инвертора напряжения с широтно-импульсной модуляцией возрастает в зависимости от конструкции электродвигателя в пределах от 1 до 15 дБ по шкале А.
При питании электродвигателя от преобразователя частоты резко возрастает число неблагоприятных факторов, влияющих на срок службы изоляции по сравнению с питанием от синусоидальной сети.
При питании от инверторов напряжения с IGBT-транзисторами, имеющими высокую частоту коммутации, значительный градиент нарастания напряжения существенно влияет на межвитковую изоляцию, особенно в зоне крайних витков. Степень вздействия зависит от величины импульсов, скорости их нарастания, частоты следования, параметров и длины кабеля между преобразователем частоты и двигателем, геометрии обмоток и ряда других факторов.
Двигатели со всыпной обмоткой из эмалированного круглого провода с номинальным напряжением до 500 В обычно выдерживают без заметного снижения срока службы изоляции импульсное напряжение с допустимой амплитудой, соответствующей зависимости, представленной на рисунке 5.
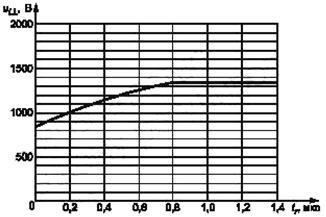
Рисунок 5 - Зависимость допустимой амплитуды импульса напряжения на клеммах электродвигателя ULL от времени нарастания импульса t1
Особое внимание следует уделять приводам с быстрым изменением скорости и с протяженными соединительными линиями между электродвигателем и преобразователем частоты, так как в этих случаях на клмеммах преобразователя частоты и электрдвигателя может быть сформировано напряжение до двухкратного по отношению к номинальному.
Стандарт ГОСТ Р МЭК/ТС 60034-17-2009 для асинхронных электродвигателей с напряжением питания свыше 500В, питаемых от инверторов с высокой частотой коммутации трбует применения специальной изоляции и/или применения дополнительных фильтров на выходе инвертора.
Известно, что амплитуда напряжения больше его среднеквадратичного значения в √2 раз, то есть, при напряжении питания 400В, амплитуда напряжения питания соствляет 565 В.
Так же следует обратить внимание, на тот факт, что при использовании динамического торможения с тормозными резисторами, напряжение на звене постоянного тока инвертора напряжения повышается с 565 В до 740 В, что так же приводит к увеличению амплитуды импульсов перенапряжения на величину около 40 %.
Таким образом, при наличии одного или нескольких из вышеуказанных факторов (длинные кабели, резкие измеения скорости, динамическое торможение), на клеммах электродвигателя и преобразователя частоты может быть сформирован импульс с амплитудой до трехкратной амплитуды напряжения питания или 1,5 кВ при напряжении питания 400 В. При этом рекомендуется применение специальных электродвигателей, разработанных для питания от преобразователей частоты и имеющих увеличенную прочности изоляции.
Так же обратим внимание на возможность применения электродвигателей с напряжением питания обмоток 230 В при соединении в треугольник (Δ) и 400 В при соединении в звезду (Y) и номинальной частотой 50 Гц при коммутации обмоток в треугольник и питании такого электродвигателя напряжением 400 В с частотой 87 Гц. При этом такой электродвигатель обеспечит номинальный момент на частоте 87 Гц, то есть практически на 75% большую мощность. В сочетании с применением редуктора, это позволяет добиться существенной экономии на стоимости электродвигателя.
Следует отметить, что такой режим работы так же увеличивает в √2 раз амплитуду импульсов перенапряжения и при неблагоприятном сочетании факторов, например длинного кабеля и режима быстрого динамического торможения, амплитуда импульса перенапряжения может достичь величины четырехкратного амплитудного напряжения питания и при питании от сети 400 В превысить 2,1 кВ, что недопустимо велико даже для специального электродвигателя, сконструированного для работы с преобразователем частоты.
К применениям, где с осторожностью необходимо относиться к использованию электродвигателей на частоте 87 Гц и повышенной мощности, следует отнести механизмы передвижения и подъема кранов, где имеет место самое неблагоприятное сочетание опасных факторов: длинные кабели, быстрое изменение скорости вращения и динамическое торможение.
Поскольку железо статора имеет неоднородную конструкцию, даже при питании от сети с синусоидальным напряжением, в железе статора создается магнитный поток, который создает в контуре, образованном валом, подшипниками, подшипниковыми щитами и корпусом осевую электродвижущую силу (ЭДС). Исследования ГОСТ Р МЭК /ТС 60034-17-2009 показывают, что при величине ЭДС менее 500 мВ не возникает необходимости в дополнительных защитных устройтсвах. В случае, если величина ЭДС существенна, через подшипники проходят токи, которые в течение короткого времени могут их разрушить. Следовательно, можно считать, что токи через подшипники являются следствием конфигурации активной части асинхронного элекродвигателя и их влияние на срок службы подшипников зависит от конструкции электродвигателя. В электродвигателях, специально разрабатываемых для работы с преобразователями частоты, конфигурация активной части вбирается таким образом, чтобы свести к минимуму факторы, ведущие к образованию кольцевых токов.
При частотном регулировании общепромышленных электродвигателей, в соответствии с ГОСТ Р МЭК /ТС 60034-17-2009, для защиты подшипников и механической части привода, соединяющего электродвигатель с нагрузкой от кольцевых токов применяется изоляция одного или обеих подщипников.
При питании электродвигателя от преобразователя частоты с инвертором напряжения величина высокочастотных составляющих напряжения могут доходить до 50% от величины постоянного напряжения в звене постоянного тока или 72% линейного напряжения на выходе преобразователя частоты. В силу наличия паразитных емкостей на больших частотах возникают существенные значения осеой ЭДС от 10 до 30 В, в результате чего пробивается смазочная пленка подшипников. При этом возникают кратковременные разрядные токи, частота повторения которых растет с ростом частоты коммутации и может достигать нескольких ампер при 50-100 импульсах за 20 мс.
В целом изоляция подшипника требуется при частотах коммутации свыше 10 кГц и напряжении питания более 499 В. Для общепромышленных электродвигателей с высотой оси вращения 315 мм и выше необходимо применение изолированного подшипника.
Следует отметить, что наряду с применением изоляции обоймы подшипника от корупса или готового изолированного подшипника, возможно так же применение токоотводящей щетки, которая через скользящий контакт отводит осевой ток с вала на статор, минуя подшипник. Так же возможно применение выходных фильтров преобразователей частоты, существенно снижающих высокочастотные составляющие токов и напряжений.
Для устранения отрицательного влияния возможно паразитные токи замкнуть через защитный экран кабеля или заземление электродвигателя на инвертор. Для выполнения этого требования необходимо использовать многожильные экранированные кабели. Экран долже быть выполнен из меди или алюминия и оба его конца должны присоединяться к РЕ-проводнику. Для обеспечения стекания токов утечки в экран кабеля, сопротивление между экраном кабеля и корпусом электродвигаеля не должно превышать 1 Ом на частоте 1 МГц. Необходимо, чтоы коробка выводов была выполнена из проводящего материала и потенциально связана с корпусом проводниками.
Все металлические части установки должны быть надежно заземлены в соответствии с требованиями Правил Устройства Электроустановок (ПУЭ) и все соединения должны иметь малое сопротивление на высоких частотах.
Для электродвигателей с высотой оси вращения более 315 мм желательно беспечение потенциальной связи между двигателем и механизмом.
Дополнительные устройства, например энкодеры, должны изолироваться от корупса электродвигателя. Экран кабеля энкодера должен быть заземлен со стороны преобразователя и изолирован от корпуса энкодера, во избежание протекания через него токов. Прокладка управляющий кабелей должна осуществляться отдельно от силовых цепей.
Максимальная допустимая скорость вращения электродвигателя определяется требованиями раздела 9.6 ГОСТ Р 52776-2007 и представлена в Таблице 1. Учитывая небольшой опыт отечественных производителей в изготовлении электродвигателей по ГОСТ 52776-2007, применение электродвигателей на повышенных частотах вращения может потребовать согласования условий работы на повышенной скорости с производителем электродвигателя.
Таблица 1 - Максимальные значения безопасной рабочей частоты вращения (мин-1) трехфазных односкоростных короткозамкнутых асинхронных электродвигателей номинальным напряжением до 1000 В включительно и частотой 50 Гц
Длительная работа с частотой вращения выше номинальной может привести к заметному снижению ресурса подшипников как из-за увеличения скорости, так и из-за нагрева самих подшипников, повышенному износу уплотнительных деталей и смазки.
Кроме этого, при длительной работе со скоростями выше номинальной следует учитывать возможные деформации ротора электродвигателя в силу увеличения воздействия центробежных сил и деформации подшипниковых щитов из-за повышенной вибрации и нагрева.


Комментарии